
Tohoku University and NEDO develop a groundbreaking omnidirectional crawler
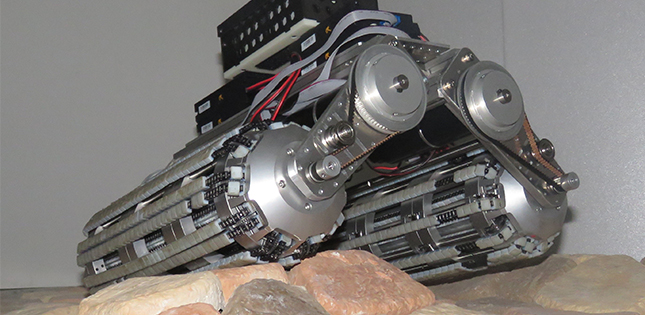
Tohoku University and the New Energy and Industrial Technology Development Organization (NEDO) have developed the world's first circular cross-section type crawler, capable of moving continuously and in any direction. This omnidirectional crawler allows mobility devices, such as wheelchairs and robots, to travel over rough terrain like soft carpet, tactile paving and railway tracks.
The new crawler is based on Tohoku University's Omni-crawler. The Omni-crawler can carry heavy loads and travel over rough surfaces. NEDO, a national research and development agency, equipped the new crawler with tracks placed radially, and as densely as possible. This enables it to move in the desired direction without changing the direction the crawler was facing and without changing the direction of the motor rotation. It is capable of going over a bump as high as 10mm in the axial direction and 20mm in the orthogonal direction. It can cross a gap as wide as 140mm.
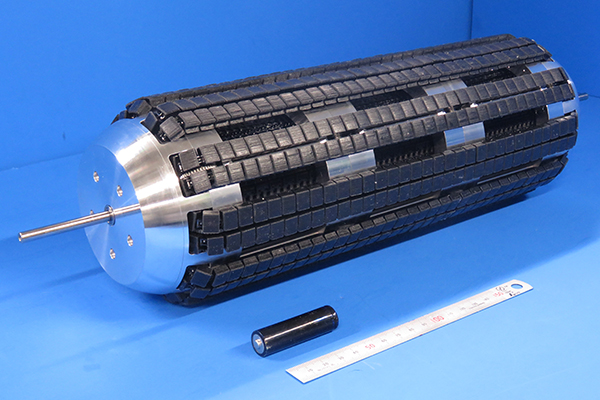
Circular cross-section type crawler ?Tohoku University
Traditional omnidirectional mobility wheels, often called omni wheels, have had many problems, such as their limited ability to move over bumps and soft surfaces. To solve these problems, NEDO and Tohoku University began a project called "365体育|365体育投注@ and Development of Innovative Actuation Technology Based on Omnidirectional Drive Mechanism" in 2015.
This resulted in the new crawler utilizing a new, screw-type differential rotation mechanism. To achieve this, NEDO positioned two apparatuses, in line symmetry, which converts power from the axis of rotation to the perpendicular direction with the use of worm gears.
This mechanism makes it possible to convert rotation (input) of the axes on and left and right to the output of revolutions and rotations. In other words, this allows for forward, backward and sideways movement. Furthermore, it is capable of transmitting a powerful driving force without depending on friction transmission by using gears, chains and belts.
This new crawler has broad applicability. This structure can be applied as a base technology for an omnidirectional travelling mechanism that is easily maintained and down-sizable. It can be used in electric wheelchairs and other mobility devices such as navigation robots and security guard robots, a useful substitute for ordinary wheels that struggle over uneven surfaces.
365体育|365体育投注@:
<Inquiries about the content of this press release>
Associate Professor Kenjiro Tadakuma
Tough Cyber Physical AI 365体育|365体育投注@ Center,
Tohoku University Graduate School of Information Sciences,
Tel: +81 (0)22-795-7025
Email: tadakuma rm.is.tohoku.ac.jp
rm.is.tohoku.ac.jp
<Inquiries about Public Relations>
Public Relations Division
Tohoku University Graduate School of Information Sciences,
Tel: +81 (0)22-795-4529
Email: koho is.tohoku.ac.jp
is.tohoku.ac.jp