
2024年 | プレスリリース?研究成果
「リアルな触覚再現技術」で触覚を「共有」へ 触覚を計測、編集、調整、再生する技術を開発
【本学研究者情報】
〇大学院情報科学研究科
准教授 昆陽雅司
研究者ウェブサイト
【発表のポイント】
- 新しいハプティック技術で体感を手軽に共有
- ヒトが感じる全ての振動から伝えたい周波数帯域の振動を抽出?強調し、体感をよりリアルに再現
- エンタメ体験やスキル習得の新しい手法を提案
【概要】
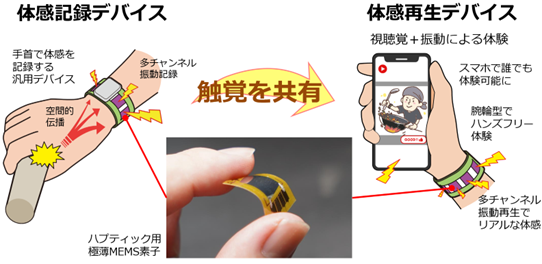
国立研究開発法人 産業技術総合研究所(以下「産総研」という)センシングシステム研究センター ハイブリッドセンシングデバイス研究チーム 竹井 裕介 研究チーム長、竹下 俊弘 主任研究員、国立大学法人 東北大学(以下「東北大」という) 大学院情報科学研究科 応用情報科学専攻?人間-ロボット情報学 昆(こん)陽(よう) 雅司 准教授国立大学法人 筑波大学(以下「筑波大」という) システム情報系 応用触覚研究室 蜂須 拓 助教、株式会社Adansons(以下「Adansons」という) 中屋 悠資 取締役CTO、は、極薄ハプティック(注1)MEMS(注2)によるハプティックデバイスを活用した「双方向リモート触覚伝達システム」を開発しました。
同システムは、触覚デバイス(注3)と触覚信号編集技術(注4)を組み合わせることで、幅広い周波数帯域の触覚信号を体験できるため、指先で触れる操作や握手などの触覚情報を手首で計測し、相手側に伝えることができる特徴があります。エンターテインメント領域でのよりリアルな振動配信の創出、遠隔地での振動体験の共有などの使用例を想定しています。
なお、この技術の詳細は、2024年3月8日~16日に米国テキサス州オースティンで開催されるSXSW Conference & Festivals 2024で発表されます。
極薄ハプティックMEMS基盤技術
【用語解説】
注1. ハプティック:
注2. MEMS:
注3. 触覚デバイス:
触覚デバイスは、皮膚に物理的な刺激を与えることにより触覚情報を伝達する装置のことを指し、スマートフォンやゲームコントローラー、VR装置などに利用されています。一般的には振動フィードバックや、皮膚を変形させる装置が用いられます.触覚提示に筋や腱の深部感覚で感じる力情報である力覚を含めることもありますが、大がかりな装置が必要な力覚提示に比べ,皮膚に対する触覚提示は小型化が容易で、ポータブルデバイス?ウエアラブルデバイスへの活用が期待されています。
注4. 触覚信号編集技術:
問い合わせ先
(研究に関すること)
東北大学大学院情報科学研究科
応用情報科学専攻?人間-ロボット情報学
准教授 昆陽 雅司
電話: 022-795-7025
Email:konyo*rm.is.tohoku.ac.jp(*を@に置き換えてください)
(報道に関すること)
東北大学タフ?サイバーフィジカルAI研究センター
電話:022-795-7025
Email:tcpai*grp.tohoku.ac.jp(*を@に置き換えてください)