
2024年 | プレスリリース?研究成果
ヒトの省エネ歩行に寄与する神経回路を推定 - 脚の振りを促進?抑制する筋肉が鍵!-
【本学研究者情報】
〇大学院工学研究科ロボティクス専攻
准教授 大脇大
研究室ウェブサイト
【発表のポイント】
- 反射制御(注1)と呼ばれるヒトの神経系に基づいた制御手法を用いて、ヒトを模した筋骨格モデル(注2)での速度可変な歩行の再現に成功しました。
- 最小二乗法(注3)を拡張した最適化アルゴリズム(注4)を開発し、省エネ歩行を実現できる神経回路モデル(注5)を構築しました。
- 再現された歩行データから、反射制御における広範な速度域の省エネ歩行に寄与する神経回路を明らかにしました。
- 生物制御に着想を得た高性能な二足歩行ロボット?義足?パワードスーツ(注6)などの工学的応用に繋がることが期待されます。
【概要】
私たちヒトは、ときにはゆっくり、ときには早く、さまざまな速度で、無意識ながら効率よく歩くことができます。しかし、そのように多様な速度で省エネ歩行を生み出すメカニズムについては不明な点が多く残されています。
東北大学大学院工学研究科の古関駿介大学院生、林部充宏教授、大脇大准教授の研究グループは、反射制御と呼ばれるヒトの神経系に基づいた制御に着目し、ヒトを模した筋骨格モデルを用いたシミュレーションによって、速度可変な歩行を再現することに成功しました。また、最小二乗法を拡張した最適化アルゴリズムを開発し、広範な速度域でより省エネな歩行を実現できる神経回路モデルを構築しました。その解析の結果、反射制御において、遊脚(注7)の振りを促進?抑制する筋肉を制御する神経回路が省エネ歩行(注8)の重要因子であることが明らかになりました。この知見は、生物制御に着想を得た二足歩行ロボット?義足?パワードスーツなどの工学的応用への貢献が期待されます。
本研究成果は、2024 年 1 月 19 日(日本時間 1 月 20 日)に計算生物科学分野の国際雑誌 PLoS Computational Biology にオンライン掲載されました。
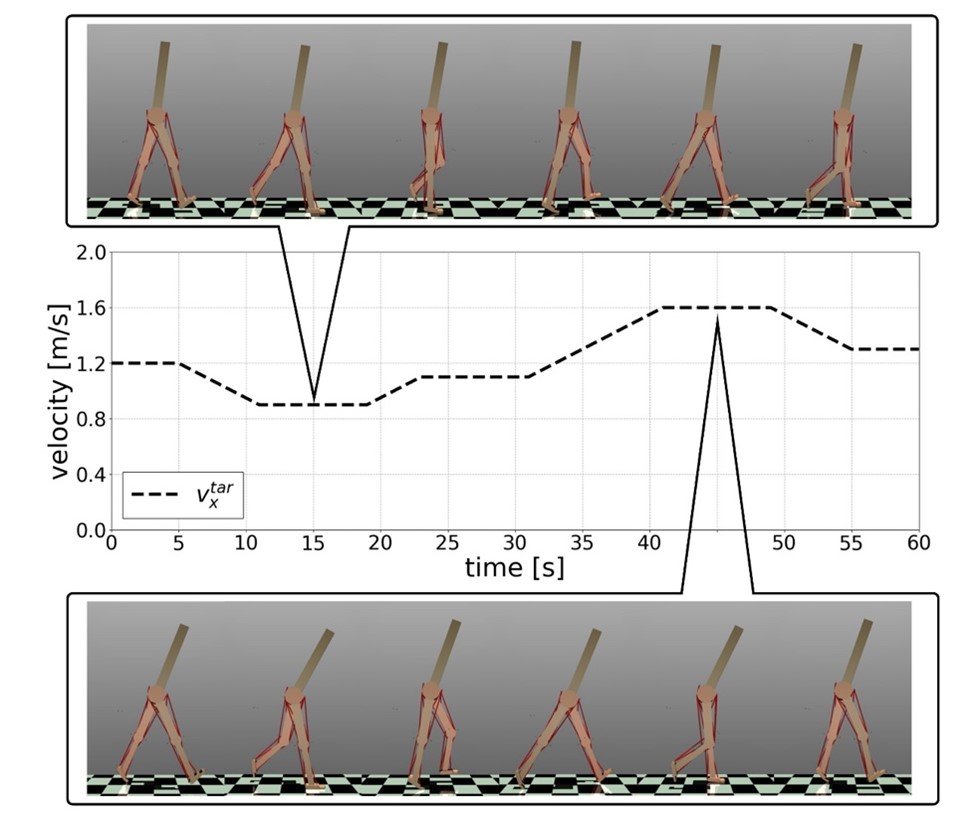
図1. 入力される目標速度( )に応じてヒトを模した筋骨格モデルが歩行速度を変化するシミュレーション。既存の反射制御の枠組みでは、正確に歩行速度を変えることはできなかった。
【用語解説】
注1. 反射制御:
反射とは刺激に対して身体が自動的に行う反応であり、意識されることなく実行される制御メカニズムを指す。身近な例として、膝のお皿の下を叩くと脚が無意識に跳ね上がる現象(専門用語では、膝蓋腱反射)がある。
注2. 筋骨格モデル:
人間の筋肉や骨格の動きを数学的にモデル化したもので、人間の動きをシミュレートする研究や、ロボットの動きを設計する際に使用される。
注3. 最小二乗法:
観測値との二乗誤差が最小となる関数を見つけ出す最適化手法。得られたデータに最も適合する直線や曲線を求めるために使用される。例えば、気温の変化を予測するために過去のデータから最も合致するトレンドラインを引く際などに利用される。
注4. 最適化アルゴリズム:
限られた資源の中で最良の結果を得るための計算手順。ビジネスでの利益最大化や、エネルギー消費の最小化など、さまざまな分野で応用される。
注5. 神経回路モデル:
人間の脳の神経細胞のネットワークを模倣した数学的モデルで、人工知能の研究や、脳?神経系の機能を理解するために用いられる。
注6. パワードスーツ:
ヒトが着用することで運動能力が強化される外部装置。高齢者の介護や、重い荷物の持ち運びの負荷を軽減するためなどに開発されている。
注7. 遊脚:
その脚が地面から離れている状態を遊脚という。一方、脚が地面に着いている状態は支持脚という。
注8. 省エネ歩行:
エネルギー消費を最小限に抑えながら効率よく歩く方法。二足歩行で有名なASIMOは、ヒトの歩行と比較して単位距離当たり16倍超のエネルギーを消費するといわれる(Collins, 2005)。
問い合わせ先
(研究に関すること)
東北大学大学院工学研究科 ロボティクス専攻
准教授 大脇 大
TEL: 022-795-4064
Email: owaki*tohoku.ac.jp(*を@に置き換えてください)
(報道に関すること)
東北大学大学院工学研究科情報広報室
担当 沼澤 みどり
TEL: 022-795-5898
Email: eng-pr*grp.tohoku.ac.jp(*を@に置き換えてください)
![]()
![]()
![]()
東北大学は持続可能な開発目標(SDGs)を支援しています